
Gaggiuino and Topology Optimization

This project was for ME 340, Mechanical Engineering Design Methodology. We were put into teams of 4 and were tasked with designing and making a sumo battle robot. We were given a base set of parts, 20 USD to spend on the robot, and allowed to use any preexisting components we had to build our robot. Our team was one of two robots that had some type of spinning weaponry to use offensively. We ultimately didn't win the competition but, we learn a lot about project management, the design of a robot, and control algorithms. This project also cemented my interest in mechatronic systems.
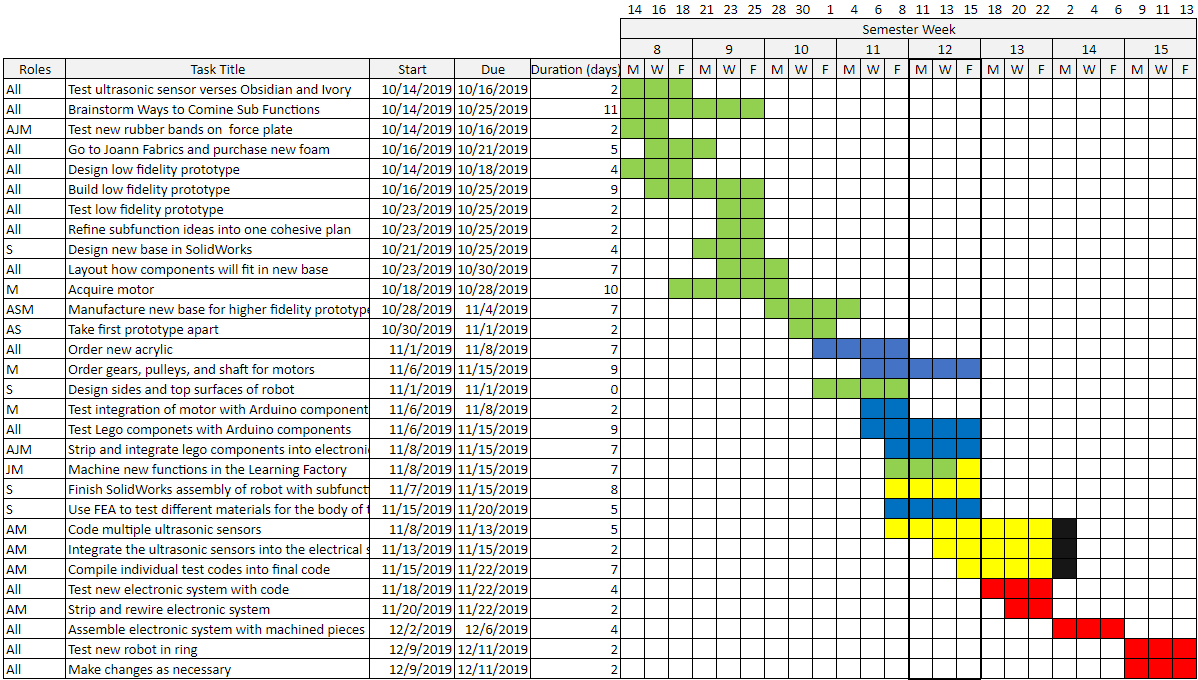
During the designing and building of this robot, we were taught ways to help keep us organized and help us effectively work together. For example, when brainstorming ideas we were told to search the internet to gain inspiration to build our robot. We were then told to critique the designs. A customer needs analysis was also made as it helps the design team focus on what is actually needed. To keep the team on task we were introduced to a Gantt chart, which can be seen below.
We decide to make our robot out of acrylic and we based the whole design around a spinning element in the front. Through some testing, we also decided to use foam on the sides as we found that it would mess with ultrasonic sensors and that was the main sensor people would use to detect other robots. As for the spinning element I was learning about BLDC motors and had a battery, ESC, and motor laying around that we could use on the robot. A GIF of the robot can be seen below.
Gaggiuino and Topology Optimization

Refitting the IVSG Mapping Van

Forged Carbon Fiber Shift Knob
Serious collaboration or work inquiries only.